Synopsis
Bead sort, also called gravity sort, is a natural sorting algorithm,
developed by Joshua J. Arulanandham, Cristian S. Calude and Michael J.
Dinneen in 2002, and published in The Bulletin of the European Association
for Theoretical Computer Science. Both digital and analog hardware implementations
of bead sort can achieve a sorting time of O(n); however, the
implementation of this algorithm tends to be significantly slower in software
and can only be used to sort lists of positive integers. Also, it would
seem that even in the best case, the algorithm requires O(n2)
space.
Overview
The bead sort operation can be compared to the manner in which beads
slide on parallel poles, such as on an abacus. However, each pole may
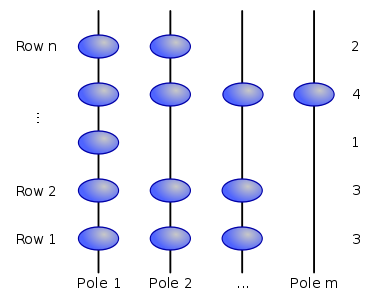
have a distinct number of beads. Initially, it may be helpful to imagine
the beads suspended on vertical poles. In Step 1, such an arrangement
is displayed using n=5
rows of beads on m=4 vertical
poles. The numbers to the right of each row indicate the number that the
row in question represents; rows 1 and 2 are representing the positive
integer 3 (because they each contain three beads) while the top row represents
the positive integer 2 (as it only contains two beads).
 |
 |
| Step 1: Suspended beads on vertical poles. |
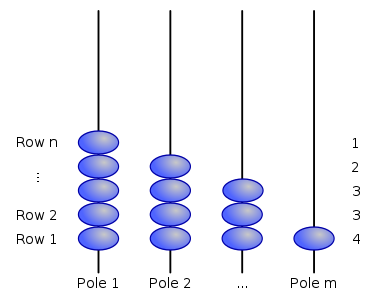
Step 2: The beads have been allowed to fall. |
If we then allow the beads to fall, the rows now represent the same integers
in sorted order. Row 1 contains the largest number in the set, while row
n contains the smallest. If the above-mentioned convention of rows containing
a series of beads on poles 1..k
and leaving poles k+1..m
empty has been followed, it will continue to be the case here.
The action of allowing the beads to "fall" in our physical example has
allowed the larger values from the higher rows to propagate to the lower
rows. If the value represented by row a
is smaller than the value contained in row a+1,
some of the beads from row a+1
will fall into row a;
this is certain to happen, as row a does not contain beads in those positions
to stop the beads from row a+1
from falling.
he mechanism underlying bead sort is similar to that behind counting
sort; the number of beads on each pole corresponds to the number of elements
with value equal or greater than the index of that pole.
Complexity
Bead sort can be implemented with four general levels of complexity,
among others:
O(1): The
beads are all moved simultaneously in the same time unit, as would be
the case with the simple physical example above. This is an abstract
complexity, and cannot be implemented in practice.O(sqrt{n}):
In a realistic physical model that uses gravity, the time it takes to
let the beads fall is proportional to the square root of the maximum
height, which is proportional to n.O(n):
The beads are moved one row at a time. This is the case used in the
analog and digital hardware solutions.O(S), where
S is the sum
of the integers in the input set: Each bead is moved individually. This
is the case when bead sort is implemented without a mechanism to assist
in finding empty spaces below the beads, such as in software implementations.
Like the Pigeonhole
sort, bead sort is unusual in that in worst case it can perform faster
than O(n log n), the fastest
performance possible for a comparison sort in worst case. This is possible
because the key for a bead sort is always a positive integer and bead
sort exploits its structure.
Implementations
Notes
The Bead-Sort algorithm has drawn interest because of its promise of
faster sorting times for positive integers, and as an excellent example
of extracting an algorithm from a simple natural process (in this case,
falling under the influence of gravity).
Speed and Complexity
There has been some confusion about the actual speed of the Bead-Sort
algorithm. In their initial paper, Arulanandham, Calude, and Dinneen (ACD)
suggested that depending on the user's perspective the sort might theoretically
be considered O(1),
O(n),
O(S)
or that is, independent of the set size, varying linearly with it, or
varying with the sum of the integers in the set. Since comparison sort
methods are or (which is the best average case, as in quicksort, for instance),
this is an exciting prospect, although it turns out to be unrealizable
in software implementations. We consider the cases in turn:
O(1): This can
only be justified by treating the falling of all the beads together as
a single event independent of the number of beads, but it is difficult
to see how it could be achieved in practice, even in a physical model,
since the time necessary for an object to fall in a uniform gravitational
field is proportional to the square root of the distance, and the beads
would need to fall a maximum distance proportional to , making the physical
model for the sorting stage, but for loading the inputs.
O(n):
This can be realized in a hardware implementation that handles the columns
in parallel. The ACD paper discusses two such hardware implementations
(explained below), with the "beads" introduced one row at a time, each
"bead" falling immediately to the lowest possible position in its column:
behavior mimicked by the "hardware" mode in this Demonstration (although
not actually realizable by software). If the beads are already in place,
the parallel processing (as done by a hardware implementation) can still
make the sort if at each step all beads above gaps fall simultaneously
and immediately as far as the next lower bead. This is modeled visually
by the "gap" setting.
Even if beads are only allowed to fall one position per time step, time
may be saved if the setup and settling phases are not separated, if new
rows are introduced one at a time at the top while the previously placed
beads are still settling. The total time is no more than O(n+m),
the sum of the number of rows and columns of the array, needing n
time steps for the loading (while settling proceeds) followed by at most
m time units
for the remainder of the settling process after the last row enters the
systemassuming comparable times for loading a new row and one settling
step.
O(S):
This is the best time that Bead-Sort can achieve without parallel treatment
of columns: either introducing rows from the top, or with rows in place
and beads scanned starting with the bottom row and continuing upward,
we allow each bead to fall as far as it can. The time is proportional
to S, the total
number of beads, which is no more than n*m.
(Straightforward software implementations are far more time intensive,
however.)
Hardware Implementations
ACD proposed analog and digital hardware implementations using a graduated
array of resistors or an array of triggered flip-flops, respectively,
where rows of "beads" enter the top of the system and settle immediately
to the lowest available level—not cascading down the columns one
level at a time. This parallelization (treating all columns simultaneously)
and short-circuiting the cascading process guarantees the O(n)
sorting time. The analog implementation successively adds "beads" to resistor
columns as voltage increments, which causes changes in the voltage levels
across each resistor below, which then indicates the presence/absence
of a bead at each position of the frame, given appropriate choices of
voltage increment and threshold voltage, and the resistances to be used
at each level. In the digital implementation, at each time step "beads"
(0s or 1s) are loaded into a buffer register Bead[i] and then "dropped"
into the main array of flip-flops, going directly to its final position
in the array. This is achieved by a clever yet simple triggering condition
for the individual cells: Cell[i,j]
starts in the 0 state and will change to the 1 state if and only if And[Bead[i],
Cell[i, j] == 0, Ceil[i, j-1] == 1].
Software Implementations
The direct software implementation of Bead-Sort is a two-dimensional
cellular automaton (CA). ACD consider state changes of the entire CA as
simultaneous, effectively requiring massive parallelization in order to
again claim a sort time of O(n).
However, in a nonparallelized algorithm, the whole n*m
array must be scanned and updated for each CA update, giving a slow O(n2 m).
This is what is actually happening behind the scenes in this Demonstration,
although the image is only updated after each iteration of the whole array.
In ill-behaved scenarios, beads may be temporarily blocked from falling
by the presence of one or more beads beneath it that must fall first.
(Run the Demonstration a few times, such cases occur rather frequently.)
Implementations that do not update the entire array at each step can
have order O(m n).
Treating only beads (i.e., filled cells, not empty cells) can reduce this
to O(S),
where is the sum of all the numbers to be sorted. But of course this is
still slower than alternative sort schemes.
Besides the significantly slower software implementation, other drawbacks
of the Bead-Sort algorithm that have been pointed out include a large
memory requirement, O(m n)or
if an actual matrix transpose is performed, the larger of O(n2)
and O(m2)and
the algorithm's (assumed) limitation to sets of positive integers. These
difficulties have limited the practical value of Bead-Sort as a software
algorithm.
|